|
Рефератыкосмонавтике административному праву хозяйственному праву устройствам экологическому праву криминалогия гражданский и землепользование обществознание |
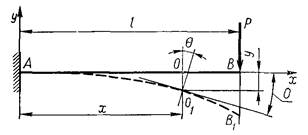
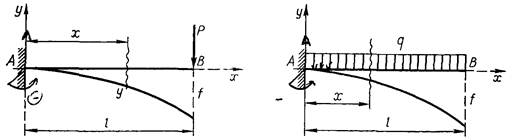
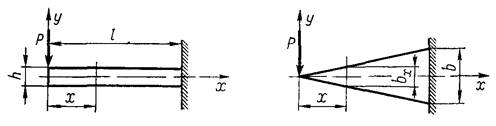
Курсовая работа: Визначення деформації балок при згиніКурсовая работа: Визначення деформації балок при згиніКурсова робота на тему Визначення деформації балок при згині 1. Прогин і поворот перерізу балки До проектуємих частин споруджень пред'являються вимоги не тільки до міцності, але і до твердості, тобто щоб їхні пружні деформації під дією навантаження були як можна меншими (у результаті великого прогину валів порушується правильність зачеплення зубчастих чи коліс виникають кромочні навантаження в підшипниках ковзання й ін.). Вивчення деформацій також необхідно при рішенні статично невизначених задач. На мал. 1 зображена в перекрученому масштабі скривлена вісь балки, затисненої одним кінцем і завантаженої на іншому кінці зосередженою силою. Початок системи координат розташуємо в одній із крапок первісної осі балки, яку завжди будемо вибирати за вісь х; вісь у будемо направляти перпендикулярно до первісної осі балки нагору. Центр ваги О якого-небудь перетину з абсцисою х переміщається в точку O1. Переміщення у центра ваги перетину по напрямку, перпендикулярному до осі балки, називається прогином балки в цьому перетині, чи прогином цього перетину балки. Оскільки прогини у звичайно малі в порівнянні з довжиною балки, то зсувом точки O1 (нейтральний шар не змінює своєї довжини при вигині) убік від перпендикуляра до осі балки можна зневажити як величиною вже 2-го порядку малості. Тоді рівняння вигнутої осі балки буде Y = f (x) (1)
Мал. 1. Найбільший прогин може служити мірилом того, наскільки
спотворюється форма конструкції при дії зовнішніх сил (прогини, що
допускаються, у залежності від призначення конструкції коливаються в межах При деформації балки перетин, залишаючись плоским, повертається стосовно свого колишнього положення (1). Кут q, на який кожен перетин повертається стосовно свого первісного положення, називається кутом повороту перетину. Дотична до вигнутої осі балки (1) у точці O1 складе з віссю х кут, рівний q, тобто це кут повороту поперечного переріза щодо первісного положення. З іншого боку, тангенс кута, утвореного дотичної до кривої у = /(х) з віссю х, дорівнює
На практиці прогини звичайно дуже малі, при цьому кути q також дуже малі, тому можна прийняти tg q == q і тоді (2) запишемо так:
тобто кут повороту перетину дорівнює першої похідної х від прогину у в цьому перетині. Таким чином, вивчення деформації балки зводиться до одержання рівняння вигнутої осі у == f (х), а вже потім простим диференціюванням обчислимо кут повороту (3). Варто пам'ятати, що по своїй фізичній сутності пружна лінія вигнутої осі балки повинна бути кривою неперервною і гладкою, що рівнозначно вимозі, щоб функція у == f (х) і її перша похідна
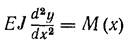
були неперервні усюди протягом осі балки. 2. Диференціальне рівняння вигнутої осі балки Для того щоб визначити у == f (х), необхідно установити залежність деформації балки від зовнішніх сил, розмірів і матеріалу балки. При перебуванні нормальних і дотичних напружень у балці при вигині прийнята наступна формула:
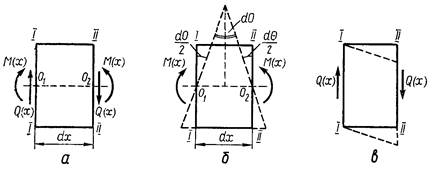
де р(х) — радіус кривизни ділянки вигнутої осі балки між двома суміжними перетинами на відстані х від початку координат; М (х) — згинальний момент у тім же перетині; EJ — твердість балки. Вплив Q (х) на деформацію балки невеликий, про що буде сказано нижче. Зміна радіуса кривизни в залежності від зміни згинаючого моменту показана на мал. 2. Для одержання рівняння вигнутої осі балки скористаємося відомим з диференціального числення вираженням кривизни кривої
Зіставляючи вираження (4) і (5), знайдемо залежність між х, у, М(х), EJ
Це і є диференціальне рівняння вигнутої осі. Рівняння (6) — звичайне нелінійне диференціальне рівняння другого порядку, що інтегрується в еліптичній і інших спеціальних функціях. Способи інтегрування таких рівнянь викладені в курсах теорії пружності. У практичних додатках звичайно користаються наближеним рівнянням. Прогини звичайно малі, при цьому кути нахилу дотичних також малі. Якщо навіть припустити, що кут нахилу перетину досяг 1°, то tg 1° Значення це настільки мале в порівнянні із одиницею, яка знаходиться в знаменнику лівої частини вираження (6), що їм можна зневажити. Тоді рівняння (6) спрощується
Це і є наближене диференціальне рівняння вигнутої осі балки. Воно дає цілком задовільні результати для більш твердих балок. Навіть при прогинах, рівної 1/10 довжини балки, погрішність досягає не більш 1,5 %.
Мал. 2 Мал. 3Правило знаків для М(х) встановлено і не залежить від
напрямку координатних осей Умовимося надалі завжди вісь у направляти нагору («+» — при напрямку у нагору, «—» — при напрямку вниз) і диференціальне рівняння (7) писати у виді
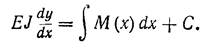
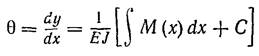
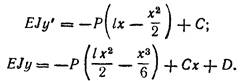
Для одержання з диференціального рівняння вигнутої осі рівняння прогинів у = f (x) необхідно зробити інтегрування рівняння (8). Інтегруючи один раз, одержимо
Інтегруючи друг раз, маємо
Таким чином, одержимо рівняння кутів повороту
і рівняння прогинів
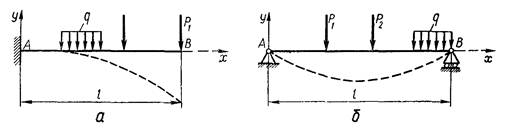
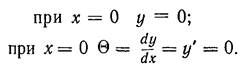
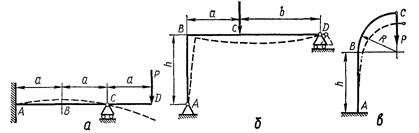
Мал. 4 де С и D — довільні постійні інтегрування, для визначення яких необхідно мати принаймні хоча б дві умови де відомі значення функції у і її похідної. Ці умови називаються граничними умовами задачі. Установимо граничні умови для консольної і простої балки (мал. 4). Незалежно від дії зовнішнього навантаження для кожної балки знайдемо дві граничні умови, з огляду на способи закріплення балки на кінцях. 1. Для консольної балки (мал. 4, а) прогин на лівому кінці дорівнює нулю; також дорівнює нулю кут нахилу дотичної q до осі. Таким чином, маємо наступні граничні умови:
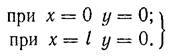
2 Для двохопорної балки (мал. 8.4 б) прогини на кінцях А и В звертаються в нуль. Одержуємо такі умови:
Визначивши з граничних умов (11) і (12) довільні постійні С и D і підставивши їх у рівняння (9) і (10), одержимо остаточне рівняння пружної лінії і кута повороту. 3. Інтегрування диференціального рівняння вигнутої осі балки, затисненої одним кінцем Приклад 1. Розглянемо балку, зображену на мал. 5. Систему координат виберемо так, як показано на малюнку. Диференціальне рівняння вигнутої осі має вид
Згинальний момент у перетині х від початку координат дорівнює М (х) = – Р (I – х) (реакція А = Р, а момент у закладенні М = –Р1). Тоді рівняння (13) приймає вид
Мал. 8.5 Мал. 8.6 Проінтегрувавши двічі, будемо мати
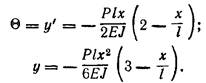
Щоб визначити постійні С и D, використовуємо граничні умови (11).
При х=0
Інженера цікавить найбільше по абсолютній величині значення прогину. Для розглянутого випадку максимум буде в точці В при х == l
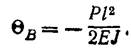
Знак мінус означає, що прогин спрямований униз. Найбільший кут повороту буде в тім же перетині при х= l
Знак мінус означає, що перетин повернувся по годинній стрілці. Для
оцінки числових значень деформацій візьмемо Р = 2 • 104 Н, l
== 2 м, [s] = 14 • 107 Па. Перетин двотаврової
балки знайдемо по сортаменті. Умова міцності
Візьмемо балку № 24, для якої W = 289 див3, j =. 3460 cм4. Приймемо Е=2 •1011 Па. Одержимо fB =
- 0,78 см; max fB складає Приклад 2. Розглянемо консольну балку, навантажену суцільним навантаженням q, Н/м (мал. 6). Повторюючи те ж, що й у попередньому прикладі, знайдемо
(тут A =ql; Будемо інтегрувати рівняння
Звівши (l — х) у квадрат і інтегруючи тричлен, як і в попередньому прикладі, для довільних постійних одержимо нульові значення. Застосуємо інший прийом інтегрування, що представляє інтерес при рішенні задач з більш складним навантаженням. Оскільки dx == —d (l — х), то, не розкриваючи вираження (l — х)2 і інтегруючи перший раз по [—d (I — х)]. одержуємо
Інтегруючи далі, одержимо
Постійні інтегрування визначаємо із граничних умов при х =
0 Підставляючи С и D у рівняння (22) і (23), остаточно знайдемо рівняння кутів повороту і прогинів
Найбільші деформації на правому кінці балки при х == I відповідно рівні
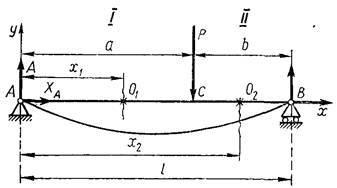
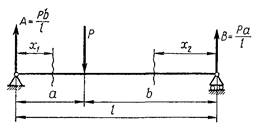
4. Інтегрування диференціального рівняння вигнутої осі балки при двох чи декількох ділянках Якщо згинальний момент на різних ділянках балки виражається різними формулами, приходиться складати стільки диференціальних рівнянь, скільки ділянок на балці. Візьмемо балку на двох опорах, із завантаженням, розмірами і початком координат, як зазначено на мал. 8.7.
Мал. 8.7 Опорні реакції балки рівні
Згинальні моменти на ділянках / і // виражаються різними формулами, тому треба взяти два довільних перетини х1 і х2 і написати два диференціальних рівняння (розглядаємо ліві частини балки)
Інтегруючи ці рівняння, одержуємо: перша ділянка
друга ділянка
У вираження для у і q увійшли чотири постійних інтегрування, удвічі більше, ніж число ділянок. Для їхнього визначення необхідно мати 4 граничні умови, де що-небудь відомо про прогини і кути повороту. Такими перетинами будуть опорні перетини А і В і перетин С — перетину розділу між ділянками І і ІІ. Значення у і q у перетині С можна обчислити з формул як для першої ділянки, так і для другої, тобто при х1 = х2 = d повинний бути у1 = у2 і q1 = q2 Таким чином, одержимо дві умови:
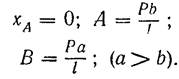
тобто точка розділу завжди дає нам дві умови. Дві інших умови одержимо на опорах у перетині А при х1 = 0 прогин у1 = 0; (34) у перетині В при х2 = l прогин у2 = 0. (35) Підставляючи перші рівняння виражень (30) і (31) в умову (32) при умові х1 = х2 = а, одержуємо С1 = С2. (36) Аналогічно з умови (33) з обліком других рівнянь (30) і (31) при х1 = х2 = а, одержимо D1 = D2 (37) тобто постійні інтегрування для обох ділянок виявилися однаковими завдяки прийнятому методу складання й інтегрування диференціальних рівнянь. Застосовуючи умову (34) до другого рівняння (30), одержимо D1 = 0, а отже, і D2 = 0. Застосовуючи ті ж рівняння (35) до другого рівняння (31), одержимо
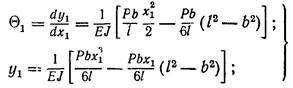
Тепер формули (30) і (31) для y і q запишуться так; перша ділянка
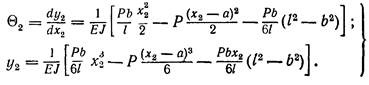
друга ділянка
З'ясуємо найбільший прогин f. Він буде в перетині, для якого q = 0. З формули для q1 бачимо, що при х1 = 0 (у перетині A)
у перетині C при x1 = а
Таким чином, q1 між точками A и С змінює знак, тобто переходить
через нуль. Виходить, найбільший прогин буде на першій ділянці. Для перебування
абсциси
Підставляючи це значення
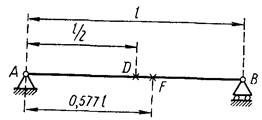
Мал.8. Відстань перетину з найбільшим прогином від лівої опори буде мінятися зі зміною положення вантажу. Якщо сила P знаходиться посередині прольоту, то
Якщо сила P наближається до опори В, тобто b® 0, то
Таким чином, при переміщенні Р від середини прольоту до опори між точками D і В (мал. 8) абсциса точки з найбільшим прогином міняється усього від 0,5l до 0,577 l між точками D і F. При розташуванні вантажу на мал. 7 прогин посередині прольоту дорівнює
і, роблячи числові підрахунки, легко переконатися, що він мало відрізняється від fmax (44). Приведені міркування дозволяють зробити практично важливий висновок: при дії будь-яких навантажень, що згинають балку в одну сторону, найбільший прогин для балки на двох, опорах буде посередині прольоту. У цьому параграфі показано, що при визначеному порядку складання й інтегрування диференціальних рівнянь можна число постійних скоротити до двох: С i D. При більшому числі ділянок завантаження таке скорочення значно спрощує підрахунки Рівність між собою довільних постійних (С1 = С2 =... = С і D = D2 = … = D) можливо при визначеному порядку складання й інтегрування диференціальних рівнянь. 5. Метод початкових параметрів Аналіз попередніх рішень показує, що при деякім перетворенні диференціальні рівняння можна скласти так, що вони будуть придатні при будь-якому виді завантаження. Зосереджені сили P1, Р2? …, розташовані на відстанях l1, l2, l3, … від початку координат, у рівняннях прогинів запишуться так:
Зосереджені моменти М1, М2,... з тими ж відстанями від початку координат дадуть у рівнянні
Рівномірно розподілені навантаження q1, q2,..., що починаються у відстанях l1, l2, … від початку координат і розташовані далі неперервно, дають вираження
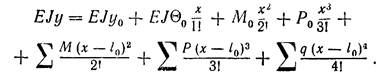
Помітимо, що коефіцієнт у знаменниках (84)... (50) не що інше, як 24 = 1 • 2 • 3. 4 = 4! 6 = 1 • 2 • 3 = 3! 2 = 1 • 2 = 2! 1 = 1 = 1! (51) Довільні постійні при прийнятому вище порядку складання виражень М(х) і порядку інтегрування будуть на всіх ділянках однакові і можуть бути замінені через збільшені в EJ раз прогин у0 і кут повороту q0 на початку координат (звідси і метод початкових параметрів). Розташовуючи члени рівнянь по висхідним ступенях х, заміняючи l1, l2, … через l0 і підсумовуючи всі однотипні члени, можемо скласти наступні загальні рівняння пружної лінії: рівняння кутів повороту
рівняння прогинів
Якщо в перетині балки, що збігає з початком координат, діє сила P0 і момент М0, то їх прийнято називати статичними, початковими параметрами Для випадку декількох моментів і сил, а також декількох ділянок розподіленого навантаження універсальне рівняння пружної лінії записують у наступній формі:
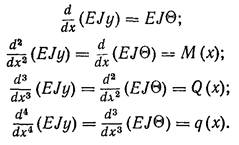
Рівняння кутів повороту завжди може бути отримано безпосереднім диференціюванням рівняння пружної лінії на відповідній ділянці балки. Таким чином, визначення переміщень по методу початкових параметрів зводиться в першу чергу до визначення значень початкових параметрів у0, q0, Р0, М0. Необхідно пам'ятати, що закон Гука справедливий не тільки для матеріалу, але і для всієї балки в цілому: прогини і кути повороту прямо пропорційні навантаженням. Ця обставина дозволяє у випадку складного навантаження одержувати рівняння вигнутої осі як суму ординат кривих, що відповідають приватним навантаженням. Особливо це спрощується при обчисленні найбільшого прогину. 6. Диференціальні залежності при вигині У розділі про вигин балки встановлені наступні диференціальні залежності: для суцільного навантаження
для поперечної сили
для згинаючого моменту
для кута повороту перетину
Ці залежності можна розташувати послідовно:
Отже, знаючи навантаження q (х) і пристрій опор балки, можна послідовним інтегруванням одержати Q (х}, М (х), EJq, EJy, а знаючи рівняння вигнутої осі, можна шляхом послідовного диференціювання по х з функції EJy одержати EJq, М (х), Q (х) і q (х). Для графічного зображення цих залежностей умовимося позитивні значення перерахованих значень відкладати нагору, вісь х — вправо, поворот перетину — проти вартовий стрілки. 7. Балки перемінного перетину. Бруси рівного опору вигину Дотепер розглядалися балки з постійними розмірами поперечних переріз по всій довжині. В більшості випадків на балку діють навантаження так, що згинальні моменти в перетинах балки перемінні і змінюються за законом чи прямої кривої. Розміри поперечного переріза балки підбираються по формулі
Отже, у балках постійного перетину матеріал витрачається неекономно. Щоб уникнути цього необхідно розміри поперечних переріз балки підбирати відповідно до М (х) і допустимим напруженням [s], тобто щоб у всіх поперечних перерізах smax, виникаючі під впливом зовнішніх сил, що діють на балку, не перевершували що допускаються
звідкіля
тобто W (х) для кожного перетину повинний мінятися пропорційно М (х). Умови (61) і (62) справедливі і для перетину з найбільшим згинальним моментом Мmax, де W (х) = W0;
Ці вимоги можуть бути задоволені, якщо перетин балок робити перемінним. Такі балки легше по вазі, вони більш гнучкі. Ці властивості особливо необхідні пластинчастим пружинам, ресорам і ін. Балки рівного опору вигину розраховуються з умов міцності і твердості Найбільше поширення одержали балки рівного опору у виді прямокутника — з перемінною шириною b (х) і постійною висотою h чи з постійною шириною і перемінною висотою (ресори, плоскі пружини й ін.). Часто зустрічаються балки рівного опору вигину (вали, осі я ін.) круглого перетину.
Мал. 9 Розглянемо балку прямокутного перетину з b = b (х) і h = const (мал. 9) Диференціальне рівняння вигнутої осі має вид
де
Значення b(х) визначимо з умов (63) з обліком того, що
момент опору в перетині на відстані х від вільного кінця буде
З (65) з обліком (66) знайдемо
де j0 - момент інерції опорного перетину. Таким чином, рівняння (64) буде мати вид
Інтегруючи, одержимо
Постійні визначаємо з граничних умов: при х = l у'
= 0 відкіля Тоді
Максимальні деформації рівні будуть при х = 0 на вільному кінці балки.
Мал. 10 Порівнюючи ці значення q і f значеннями для балки постійного перетину, бачимо, що деформації (70) q у два, а у в 1,5 рази більше, ніж у брусів постійного перетину. Таким чином, балки перемінного перетину мають більшу гнучкість у порівнянні з балками постійної твердості при однаковій з ними міцності. Саме тому, а не заради економії матеріалу їх і застосовують у таких конструкціях, як ресори, пружини й ін. 8. Потенційна енергія деформації при вигині Крім розглянутих способів обчислення у і q перетинів балок існує більш загальний метод, заснований на застосуванні закону збереження енергії і придатний для визначення деформацій будь-яких пружних конструкцій (систем). Під пружною системою будемо розуміти систему стрижнів, чи шарнірно жорстко зв'язаних між собою (мал. 10). При статичній дії навантажень відбувається перетворення потенційної енергії з одного виду в іншій. Повне перетворення енергії з одного виду в іншій має місце тільки тоді, коли деформація відбувається без порушення рівноваги системи. Закон збереження енергії при деформації пружних систем приймає вид
Рівність (71) показує, що при переміщеннях без порушення рівноваги сума робіт усіх сил, прикладених до крапок тіла, дорівнює нулю і що потенційна енергія деформації U численно дорівнює роботі зовнішніх сил Ар, проробленої ними при цій деформації,
Мал. 8.11
Мал. 12 При обчисленні потенційної енергії будемо припускати, що деформації пропорційні навантаженням і ростуть постійно разом з ними. Аналогічно, як і при розтяганні, зрушенні, крутінні, обчислимо потенційну енергію при чистому вигині
тобто потенційна енергія деформації дорівнює половині добутку сили (розтягання, зрушення) чи пари сил (крутіння, вигин) па переміщення крапки додатка цієї сили по напрямку сили. Умовимося називати терміном «узагальнена сила» усяке навантаження, яке викликає відповідне навантаженню переміщення, тобто зосереджену силу чи пару сил; переміщення, що відповідає цій силі, будемо називати «узагальненою координатою». Тоді формула для потенційної анергії при різних видах деформації узагальнюється
де Р — узагальнена сила; d — узагальнена координата. У загальному випадку вигину згинальний момент М (х) — значення перемінне. У будь-якому перетині йому буде супроводжувати поперечна сила Q (х) Тому розглядати випливає не всю балку в цілому, а лише нескінченно малий елемент балки довжиною dx При дії згинаючих зусиль перетину елемента повертаються й утворять між собою кут d (мал. 11). Дотичні зусилля прагнуть викликати перекіс елемента. Звичайно робота дотичних зусиль виявляється малої в порівнянні з роботою нормальних зусиль, тому нею зневажаємо. Елементарна ж робота нормальних зусиль дорівнює
Уся потенційна енергія виходить підсумовуванням по довжині балки
У тих випадках, коли маємо дві і більш ділянки для М (х), інтеграл (8.76) розбиваємо на суму інтегралів
Як приклад розглянемо балку на двох опорах (мал. 12) із зосередженою силою. Обчислимо за допомогою потенційної енергії прогин під силою Р. Епюра моменту має дві ділянки, тому і потенційну енергію (77) обчислимо по формулі
де
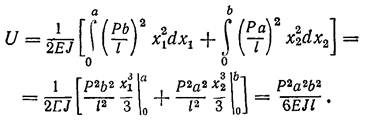
і тоді
Відповідно до формул (72) і (75) з обліком того, що з зовнішніх сил тільки сила Р робить роботу при деформації балки,
одержимо прогин під цією силою
Якщо сила прикладена посередині відоме вираження прогину
|
 (4)
(4) (5)
(5) (8.6)
(8.6)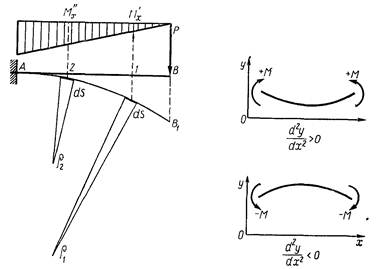
 (8)
(8)

 (9)
(9)
 (11)
(11) (12)
(12)
 (15)
(16)
(15)
(16) (17)
(18)
(17)
(18) (20)
(20) (23)
(23) (24) (25)
(24) (25) (26)
(27)
(26)
(27)
 (28) (29)
(28) (29) (3о)
(3о) (31)
(31) (32)
(33)
(32)
(33) (38)
(38) (39)
(39) (40)
(40) (41)
(41)
 (45)
(45) (46)
(46) (48)
(48) (50)
(50) (53)
(53) (54)
(54) (56)
(56) (59)
(59) (60)
(60) (61)
(61) (62)
(62) (63)
(63)
 (73)
(73) (76)
(76) (77)
(77)

 (78)
(78)
 (79)
(79) , то одержимо уже
, то одержимо уже