|
Рефератыкосмонавтике административному праву хозяйственному праву устройствам экологическому праву криминалогия гражданский и землепользование обществознание |
Курсовая работа: Анализ системы автоматического регулирования угловой скорости вращения турбиныКурсовая работа: Анализ системы автоматического регулирования угловой скорости вращения турбиныФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ РОССИЙСКОЙ ФЕДЕРАЦИИ ОМСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Кафедра «Авиа- и ракетостроение» Специальность 160801- «Ракетостроение» Курсовая работа по дисциплине «Теория автоматического регулирования» АНАЛИЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ТУРБИНЫ Выполнил: студент гр. Руководитель: Омск 2007 Задание
1. Написать уравнения, передаточный функции элементов. Составить структурную схему. Определить передаточные функции разомкнутой, замкнутой систем и передаточную функцию по ошибке. 2. Построить частотные характеристики (АЧХ, ФЧХ) системы, ЛАЧХ разомкнутой системы, переходную характеристику. 3. Исследовать систему на устойчивость. Определить запасы устойчивости. 4. Определить коэффициенты ошибок. Найти установившуюся ошибку Dx(t) при функции входного сигнала xВХ(t) = 1; t; t2. 5. Определить показатели качества (время регулирования, перерегулирование, колебательность переходного процесса). 6.
Определить
параметры корректирующего звена, обеспечивающие наибольшее быстродействие при
достаточном запасе устойчивости (по амплитуде не менее 6 дБ, по фазе не менее Исходные данные
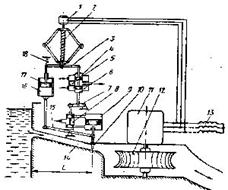
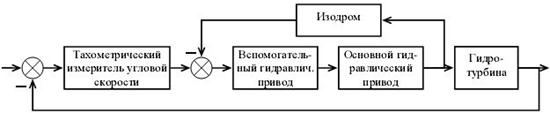
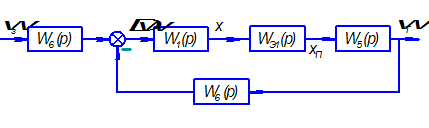
Рис.1. Система автоматического регулирования угловой скорости вращения гидротурбины
Рис.2. Блок-схема системы автоматического регулирования угловой скорости вращения гидротурбины Выполнение работы 1. Передаточные функции элементов системы (звеньев) Это выполняется в два действия: - Из исходного дифференциального уравнения элемента САУ
получить уравнение в операторной форме. Это выполняется путем замены
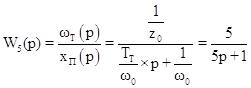
производной - Из полученного алгебраического уравнения выразить отношение выходной величины к входной. Это отношение равно передаточной функции. Центробежный тахометр Уравнение
элемента: Уравнение в операторной форме:
Входным
сигналом является угловая частота вращения
Вспомогательный гидропривод Так как по
условию перемещение гидроусилителя 6 равно перемещению золотника 4, т.е.
значения входного и выходного сигналов равны, то Основной гидропривод Уравнение
элемента: Уравнение в операторной форме:
Входным
сигналом является перемещение штока золотника
Изодром Уравнение элемента:
Уравнение в операторной форме:
Входным
сигналом является перемещение цилиндра изодрома
Гидротурбина Уравнение элемента:
Уравнение в операторной форме:
Входным
сигналом является перемещение задвижки
Усилитель
Редуктор
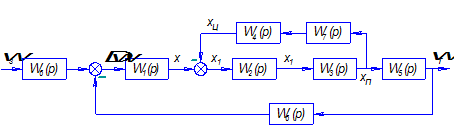
Структурная схема системы регулирования будет выглядеть следующим образом:
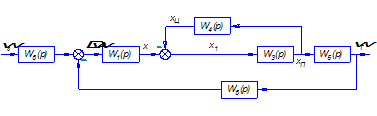
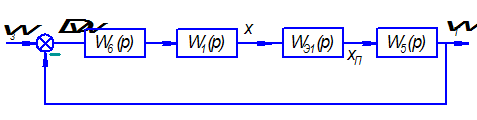
Рис. 1. Структурная схема системы автоматического регулирования угловой скорости вращения гидротурбины Изобразим структурную схему с учётом исходных данных:
Рис. 2. Структурная схема САУ Проведём преобразования структурной схемы. Объединим
звено с передаточной функцией
Перенесём
сумматор с правой стороны усилителя (
Объединим последовательные звенья:
Передаточная
функция эквивалентного звена
Передаточная функция замкнутой системы:
В общем виде
где Передаточная функция по ошибке:
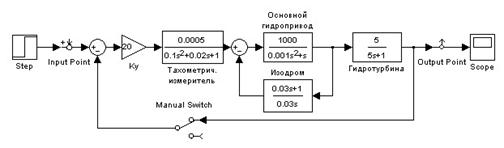
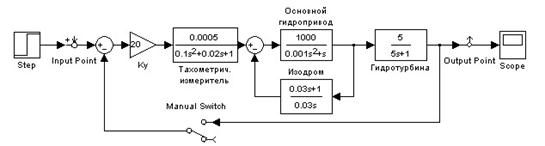
Модель данной системы, составленная в MATLAB / SIMULINK , имеет следующий вид:
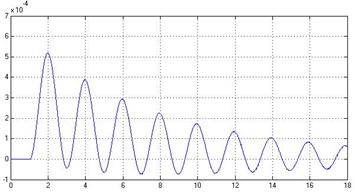
Рис. 3. Модель замкнутой САУ, составленная в MATLAB / SIMULINK Для проверки корректности модели следует подать на вход системы какой-либо сигнал и посмотреть поведение выходного сигнала. В качестве входного используем ступенчатый сигнал (блок Step), выходной сигнал выведем на график с помощью осциллографа Scope.
Рис. 4. Результат работы модели САУ в MATLAB / SIMULINK 2. Построение частотных характеристик (АЧХ, ФЧХ) системы, ЛАЧХ разомкнутой системы, переходной характеристики На рис.3 показана модель замкнутой системы. Чтобы построить характеристику для разомкнутой системы (кривую Найквиста), необходимо разорвать главную обратную связь (рис.5).
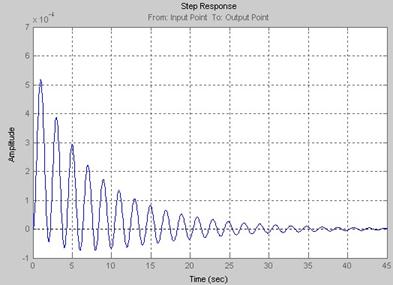
Рис. 5. Модель разомкнутой САУ, составленная в MATLAB / SIMULINK Имея модель САУ в SIMULINK, легко построить её частотные и переходную характеристики с помощью другого инструмента: LTI Viewer. Он предназначен для анализа линейных стационарных систем. С помощью данного инструмента можно построить частотные характеристики исследуемой системы, получить её отклики на единичные ступенчатое и импульсное воздействия, построить годограф Найквиста и т.д.
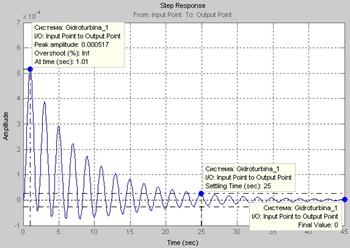
Рис. 5. Переходный процесс САУ Для построения
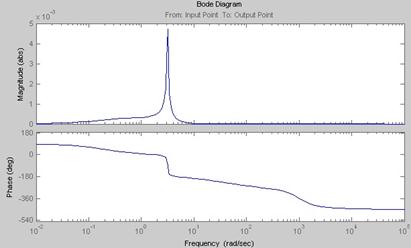
амплитудно-частотной характеристики (АЧХ) замкнутой системы производят
подстановку Фазо-частотная характеристика (ФЧХ) замкнутой системы строится по выражению:
т. е. как
аргумент комплексной передаточной функции замкнутой системы.
Рис. 6. АЧХ и ФЧХ замкнутой системы
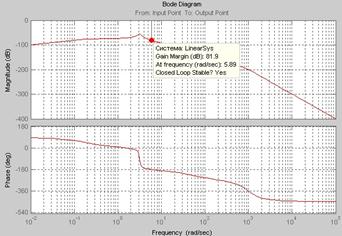
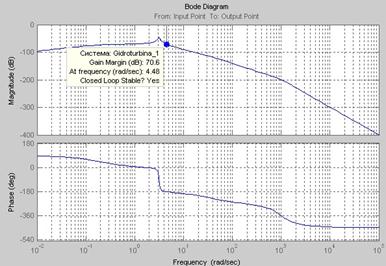
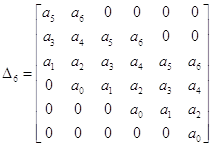
Рис. 7. Логарифмические частотные характеристики разомкнутой САУ 3. Исследование системы на устойчивость Критерий Гурвица Характеристическое уравнение замкнутой системы в общем виде имеет вид:
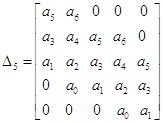
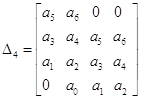
Составим определители Гурвица:
Программа анализа устойчивости САУ: % Анализ устойчивости САУ по Гурвицу % Коэффициенты характеристического уравнения замкнутой системы: a7=75; a6=75030; a5=75030753; a4=2530753150; a3=1753150000; a2=254*1.0e+8; a1=5*1.0e+9; % a - вектор коэффициентов характеристического уравнения замкнутой системы % a(7)*p^6+a(6)*p^5+a(5)*p^4+a(4)*p^3+a(3)*p^2+a(2)*p^1+a(1) % нумерация начинается с единицы, а не с нуля a = [a1 a2 a3 a4 a5 a6 a7]; disp('Вычисление определителей Гурвица:'); A6=[a(6) a(7) 0 0 0 0; a(4) a(5) a(6) a(7) 0 0; a(2) a(3) a(4) a(5) a(6) a(7); 0 a(1) a(2) a(3) a(4) a(5); 0 0 0 a(1) a(2) a(3); 0 0 0 0 0 a(1)] d6=det(A6) A5=[a(6) a(7) 0 0 0; a(4) a(5) a(6) a(7) 0; a(2) a(3) a(4) a(5) a(6); 0 a(1) a(2) a(3) a(4); 0 0 0 a(1) a(2)] d5=det(A5) A4=[a(6) a(7) 0 0; a(4) a(5) a(6) a(7); a(2) a(3) a(4) a(5); 0 a(1) a(2) a(3)] d4=det(A4) A3=[a(6) a(7) 0; a(4) a(5) a(6); a(2) a(3) a(4)] d3=det(A3) A2=[a(6) a(7); a(4) a(5)] d2=det(A2) A1=[a(6)] d1=det(A1) if d6>0 && d5>0 && d4>0 && d3>0 && d2>0 && d1>0 s='Так как все определители Гурвица больше нуля, то система УСТОЙЧИВА'; else s='Так как не все определители Гурвица положительны, то система НЕ УСТОЙЧИВА'; end disp(s); Результат работы программы: >> Вычисление определителей Гурвица: A6 = 1.0e+010 * 0.0000 0.0000 0 0 0 0 0.2531 0.0075 0.0000 0.0000 0 0 2.5400 0.1753 0.2531 0.0075 0.0000 0.0000 0 0.5000 2.5400 0.1753 0.2531 0.0075 0 0 0 0.5000 2.5400 0.1753 0 0 0 0 0 0.5000 d6 = 8.7654e+050 A5 = 1.0e+010 * 0.0000 0.0000 0 0 0 0.2531 0.0075 0.0000 0.0000 0 2.5400 0.1753 0.2531 0.0075 0.0000 0 0.5000 2.5400 0.1753 0.2531 0 0 0 0.5000 2.5400 d5 = 1.7531e+041 A4 = 1.0e+010 * 0.0000 0.0000 0 0 0.2531 0.0075 0.0000 0.0000 2.5400 0.1753 0.2531 0.0075 0 0.5000 2.5400 0.1753 d4 = 1.3753e+031 A3 = 1.0e+010 * 0.0000 0.0000 0 0.2531 0.0075 0.0000 2.5400 0.1753 0.2531 d3 = 1.3757e+022 A2 = 1.0e+009 * 0.0001 0.0000 2.5308 0.0750 d2 = 5.4398e+012 A1 = 75030 d1 = 75030 Так как все определители Гурвица больше нуля, то система УСТОЙЧИВА. Критерий Михайлова Построим
годограф Михайлова – кривую, которая описывается характеристическим вектором на
комплексной плоскости. Характеристический вектор получим, подставив
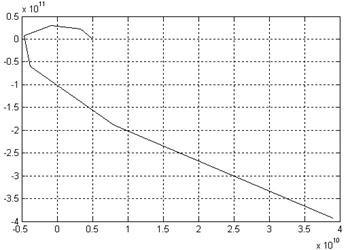
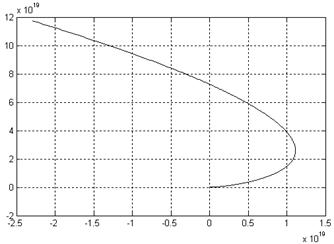
Программа анализа устойчивости САУ: disp (' *** Анализ устойчивости по критерию Михайлова ***'); % знаменатель характеристического уравнения замкнутой системы % a(7)*p^6+a(6)*p^5+a(5)*p^4+a(4)*p^3+a(3)*p^2+a(2)*p^1+a(1), где вектор a найден ранее for i=1:1101 w(i)=i-1;% вектор значений частот end N=length(w); for k=1:N M(k)=-a(7)*w(k)^6+a(6)*j*w(k)^5+a(5)*w(k)^4-a(4)*j*w(k)^3-a(3)*w(k)^2+a(2)*j*w(k)+a(1); end x=real(M); % действительная часть y=imag(M); % мнимая часть plot(x,y); grid on; В результате получаем график (рис. 8,а,б).
а)
б) Рис.8. Кривая
Михайлова: а) Характеристический
полином имеет степень 6-го порядка, следовательно, для устойчивости данной
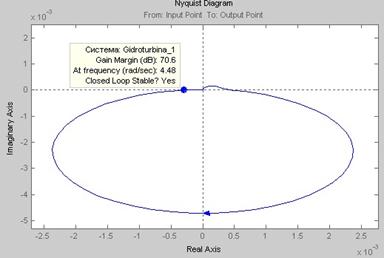
системы необходимо, чтобы характеристический вектор описывал угол Критерий Найквиста Критерий Найквиста позволяет судить об устойчивости замкнутой системы по виду амплитудно-фазовой характеристики (АФЧХ) разомкнутой системы. АФЧХ разомкнутой системы, строим в программе MATLAB/SIMULINK с помощью инструмента LTI Viewer.
Рис.9. АФЧХ (кривая Найквиста) разомкнутой системы Так как кривая Найквиста не охватывает точку (-1;i0), то система является устойчивой. Запасы устойчивости Запасы устойчивости определим графически по ЛЧХ разомкнутой системы (рис.7).
Запас
устойчивости по амплитуде По
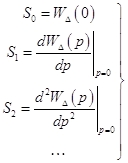
определению частота среза Вывод: система устойчива. 4. Оценка точности САУ Если передаточную функцию по ошибке
представить в виде степенного ряда
то
коэффициенты
Затем величину ошибки можно рассчитать по формуле
В задании требуется определить ошибку при xВХ(t) = 1; t; t2 . Программа расчёта величины ошибки: disp (' *** Определение коэффициентов ошибок ***'); syms p Wd x dx t % p, Wd, x, dx - символьные переменные a(2)=252.5*1.0e+8; disp (' Передаточная функция по ошибке '); Wd=(a(7)*p^6+a(6)*p^5+a(5)*p^4+a(4)*p^3+a(3)*p^2+a(2)*p+a(1))/(a(7)*p^6+a(6)*p^5+a(5)*p^4+ +a(4)*p^3+a(3)*p^2+(a(2)+0.075*1.0e+8)*p+a(1)); pretty(Wd) % вывод в удобочитаемом виде disp (' Коэффициенты ошибок '); S0=subs(diff(Wd,p,0),p,0) S1=subs(diff(Wd,p,1),p,0) S2=subs(diff(Wd,p,2),p,0) S3=subs(diff(Wd,p,3),p,0) S4=subs(diff(Wd,p,4),p,0) S5=subs(diff(Wd,p,5),p,0) S6=subs(diff(Wd,p,6),p,0) disp (' '); disp ('Определение ошибки при различных функциях входного сигнала'); x=1 dx=eval(S0*x+S1*diff(x,t)+S2*diff(x,t,2)+S3*diff(x,t,3)+S4*diff(x,t,4)+S5*diff(x,t,5)+S6*diff(x,t,6)) %pretty(dx) x=t dx=eval(S0*x+S1*diff(x,t)+S2*diff(x,t,2)+S3*diff(x,t,3)+S4*diff(x,t,4)+S5*diff(x,t,5)+S6*diff(x,t,6)); pretty(dx) x=t^2 dx=eval(S0*x+S1*diff(x,t)+S2*diff(x,t,2)+S3*diff(x,t,3)+S4*diff(x,t,4)+S5*diff(x,t,5)+S6*diff(x,t,6)); pretty(dx) Результат работы программы: *** Определение коэффициентов ошибок *** Передаточная функция по ошибке 6 5 4 3 2 (75 p + 75030 p + 75030753 p + 2530753150 p + 1753150000 p / 6 5 4 + 25250000000 p + 5000000000) / (75 p + 75030 p + 75030753 p / 3 2 + 2530753150 p + 1753150000 p + 25257500000 p + 5000000000) Коэффициенты ошибок S0 = 1 S1 = -0.0015 S2 = 0.0152 S3 = -0.2265 S4 = 4.5312 S5 = -113.3155 S6 = 3.4005e+003 Определение ошибки при различных функциях входного сигнала x = 1 dx = 1 x = t 211106232533 t - ---------------------- 140737488355328 x = t^2 2 211106232533 34124900276475 t - --------------------- t + ------------------------ 70368744177664 1125899906842624 При При При 5. Показатели качества переходного процесса Для определения показателей качества переходного процесса проанализируем переходную характеристику на рис.10.
Рис.10. Переходная характеристика САУ Будем
определять следующие показатели качества переходного процесса: время
регулирования переходного процесса Время
регулирования переходного процесса Время
регулирования переходного процесса Колебательность
переходного процесса Колебательность
переходного процесса Недорегулирование
где
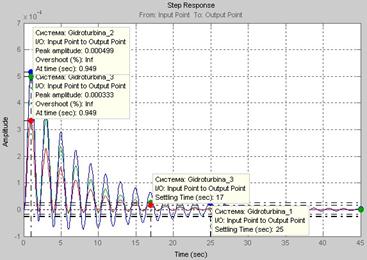
6. Коррекция динамических свойств системы Простейшим способом повышения качества САУ является подбор значений параметров её элементов. Новые значения параметров звеньев:
Рис.11. Графики переходной характеристики САУ до и после корректирования Время
регулирования переходного процесса Колебательность
переходного процесса Максимальное
значение Запас устойчивости системы увеличился (рис.12).
Рис.12. ЛЧХ разомкнутой САУ Список литературы 1. Черных И.В. "Simulink: Инструмент моделирования динамических систем" (simulink.chm) 2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. Ситников Д.В. Омск: ОмГТУ, 2003. |
 .
.
 ;
;  ;
;  ;
; ;
;  ;
;